

การแนะนำ
1.1 ความเป็นมาและความสำคัญของการวิจัย
ในขณะที่เทคโนโลยีหุ่นยนต์ก้าวไปสู่ความแม่นยำ การย่อขนาด และความชาญฉลาด โมดูลเส้นเลเซอร์จึงกลายเป็นส่วนประกอบการตรวจจับที่สำคัญ โมดูลเส้นเลเซอร์ขนาด 650nm 5mw โดดเด่นด้วยการใช้พลังงานต่ำ การมองเห็นสูง และต้นทุน-ประสิทธิผล ทำให้เหมาะสำหรับหุ่นยนต์อุตสาหกรรม บริการ และหุ่นยนต์พิเศษ ช่วยปรับปรุงความแม่นยำและประสิทธิภาพของหุ่นยนต์ในขณะที่ลดต้นทุนของระบบ ส่งเสริมความนิยมของเทคโนโลยีหุ่นยนต์
1.2 สถานะการวิจัยและการสมัครทั้งในประเทศและต่างประเทศ
ในระดับสากล โมดูลเส้นเลเซอร์ถูกนำมาใช้อย่างเต็มรูปแบบในหุ่นยนต์อุตสาหกรรมและหุ่นยนต์บริการเพื่อการประกอบ การวางตำแหน่ง และการหลีกเลี่ยงสิ่งกีดขวาง ในประเทศ โมดูล 650nm 5mw ถูกนำไปใช้มากขึ้นในสาขาพลเรือนและอุตสาหกรรม อย่างไรก็ตาม ความท้าทายยังคงมีอยู่ เช่น การมองเห็นที่ลดลงในที่มีแสงจ้า ความเข้ากันได้ของการบูรณาการที่ไม่ดี และการทำงานในระยะยาว-ไม่เสถียร
1.3 เนื้อหาและกรอบการวิจัย
บทความนี้มุ่งเน้นไปที่การใช้งานโมดูลเส้นเลเซอร์ 650nm 5mw ในหุ่นยนต์ ซึ่งครอบคลุมคุณลักษณะ สถานการณ์การใช้งาน ข้อดี ปัญหาที่มีอยู่ แผนการเพิ่มประสิทธิภาพ และแนวโน้มในอนาคต โดยเป็นข้อมูลอ้างอิงที่ครอบคลุมสำหรับการใช้งานในเชิงลึก-

บทที่ 1 ลักษณะสำคัญและหลักการทำงาน
1.1 การวิเคราะห์พารามิเตอร์หลัก
โมดูลเส้นเลเซอร์ 650nm 5mw มีประสิทธิภาพที่ยอดเยี่ยม:
แสงสีแดง 650 นาโนเมตร (ทัศนวิสัยสูง เหมาะสำหรับในร่ม/กลางแจ้งระยะสั้น-ในระยะทางกลาง)
พลังงานต่ำ 5mw (ความปลอดภัย Class IIIa, อายุการใช้งานแบตเตอรี่ของหุ่นยนต์ยาวนาน);
ปรับโฟกัสได้ เส้นเลเซอร์เกาส์เซียน และความเสถียรสูง
ขนาดกะทัดรัด (เช่น φ16มม.×70มม.) เปลือกโลหะ (กระจายความร้อนอย่างมีประสิทธิภาพ ป้องกันการรบกวน-รุนแรง)
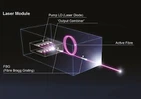
1.2 หลักการทำงาน
โมดูลนี้ปล่อยเลเซอร์ผ่านไดโอดเซมิคอนดักเตอร์ ซึ่งสร้างเป็นเส้นสม่ำเสมอด้วยเลนส์เกาส์เซียน
วงจรขับเคลื่อนกระแสคงที่ช่วยให้มั่นใจได้ถึงเอาต์พุตที่เสถียร และโครงสร้างการกระจายความร้อนของโลหะรับประกันการทำงานที่ต่อเนื่อง
สำหรับหุ่นยนต์ ข้อมูลอ้างอิงสำหรับการวางตำแหน่ง การตรวจจับ และการนำทาง โดยร่วมมือกับอัลกอริธึมเพื่อให้เกิดการทำงานที่แม่นยำ
1.3 การเปรียบเทียบกับโมดูลเลเซอร์อื่นๆ
เมื่อเปรียบเทียบกับโมดูลกำลังสูง-: กำลังต่ำกว่า ปลอดภัยกว่า ต้นทุนต่ำกว่า เหมาะสำหรับหุ่นยนต์พลเรือน/อุตสาหกรรมเบา
เมื่อเทียบกับความยาวคลื่นอื่นๆ: มองเห็นได้ดีกว่า ต้นทุนต่ำกว่า และไม่มีอุปกรณ์รับสัญญาณพิเศษ
เมื่อเปรียบเทียบกับโมดูลเลเซอร์แบบจุด: ครอบคลุมกว้างกว่า เหมาะสำหรับการวางตำแหน่งพื้นที่ขนาดใหญ่-
บทที่ 2 สถานการณ์การใช้งานหลัก
2.1 หุ่นยนต์อุตสาหกรรม (สถานการณ์หลัก)
มีการใช้กันอย่างแพร่หลายในการประกอบที่มีความแม่นยำ (ลดข้อผิดพลาดในการวางตำแหน่ง), AGV/การนำทางเส้นทางหุ่นยนต์จัดการ (หลีกเลี่ยงการชนกัน) และการตรวจจับ/คัดแยกชิ้นงาน (ปรับปรุงความแม่นยำ) ช่วยเพิ่มประสิทธิภาพการผลิตได้อย่างมีประสิทธิภาพ
2.2 หุ่นยนต์บริการ
สำหรับหุ่นยนต์กวาดบ้าน: ช่วยสแกนสภาพแวดล้อม การหลีกเลี่ยงสิ่งกีดขวาง และการวางแผนเส้นทาง
สำหรับหุ่นยนต์เชิงพาณิชย์ (คู่มือการซื้อของ การส่งอาหาร): รองรับการวางตำแหน่งในอาคารด้วยอัลกอริธึม SLAM
สำหรับการดูแลผู้สูงอายุ/หุ่นยนต์ทางการแพทย์: ตรวจจับสิ่งกีดขวางเพื่อความปลอดภัยในการเคลื่อนไหว
2.3 หุ่นยนต์พิเศษ
สำหรับหุ่นยนต์ตรวจสอบ (พลังงาน เคมี): ค้นหาข้อบกพร่องของอุปกรณ์ ปรับปรุงประสิทธิภาพและความปลอดภัยในการตรวจสอบ
สำหรับหุ่นยนต์เพื่อการศึกษา/ผู้สร้าง: ตระหนักถึงการสอนด้วยภาพเกี่ยวกับหลักการวางตำแหน่งและการวางแผนเส้นทาง
2.4 กรณีทั่วไป
กรณีที่ 1: หุ่นยนต์ AGV – อัตราความล้มเหลวลดลง 68%, ค่าบำรุงรักษาลดลง 40%+
กรณีที่ 2: หุ่นยนต์กวาด – ความแม่นยำในการจดจำสิ่งกีดขวางสูงขึ้น 30%
กรณีที่ 3: หุ่นยนต์ประกอบอุตสาหกรรม – ปรับปรุงความแม่นยำ ลดการหยุดสายการผลิต
บทที่ 3 ข้อได้เปรียบหลัก
3.1 ความสามารถในการปรับตัว: พบกับการออกแบบหุ่นยนต์
การใช้พลังงานต่ำ (มากกว่าหรือเท่ากับ 8000 ชั่วโมงการทำงานต่อเนื่อง ช่วยยืดอายุแบตเตอรี่ของหุ่นยนต์);
ขนาดกะทัดรัด (รวมง่าย); ปรับอุณหภูมิได้กว้าง (-10 องศา ~ 50 องศา บางส่วนสูงถึง 60 องศา)
3.2 ประสิทธิภาพ: รับประกันความแม่นยำ
ทัศนวิสัยสูง (ชัดเจนในแสงที่ซับซ้อน);
ความเสถียรสูง (การลดทอนแสงน้อย ป้องกันการ-กระแทก/รบกวน)
ปรับโฟกัสได้ (ปรับให้เข้ากับสถานการณ์ต่างๆ)
3.3 ต้นทุนและการปฏิบัติจริง
ต้นทุน-มีประสิทธิภาพ (เหมาะสำหรับการใช้งานขนาดใหญ่-);
รวมง่าย (DC 3V ~ 5V เข้ากันได้กับ Arduino);
การบำรุงรักษาต่ำ (โครงสร้างเรียบง่าย รับประกัน 6 เดือน)
บทที่ 4 ปัญหาที่มีอยู่และการเพิ่มประสิทธิภาพ
4.1 ปัญหาหลัก
1. ทัศนวิสัยไม่ดีในที่มีแสงจ้า
2. เข้ากันไม่ได้กับอินเทอร์เฟซหุ่นยนต์บางตัว;
3. การลดทอนแสงแบบเร่งในสภาพแวดล้อมที่รุนแรง (อุณหภูมิสูง, การสั่นสะเทือน)
4.2 แผนการเพิ่มประสิทธิภาพ
1. เพิ่มฟิลเตอร์และปรับเลนส์ให้เหมาะสมเพื่อต้านทานแสงโดยรอบ
2. กำหนดอินเทอร์เฟซให้เป็นมาตรฐานและจัดทำโครงร่างไดรฟ์ที่ปรับแต่งเอง
3. อัพเกรดการกระจายความร้อนและเพิ่มประสิทธิภาพวงจรขับเคลื่อน
4.3 มาตรฐานอุตสาหกรรม
ปฏิบัติตามมาตรฐานความปลอดภัยเลเซอร์ Class IIIa อย่างเคร่งครัด ปรับให้เข้ากับข้อกำหนดอินเทอร์เฟซของหุ่นยนต์และแหล่งจ่ายไฟเพื่อปรับปรุงความคล่องตัว
บทที่ 5 แนวโน้มการพัฒนา
5.1 แนวโน้มเทคโนโลยี
เสถียรภาพที่ดีขึ้นและการลดทอนแสงน้อย
การบูรณาการเชิงลึกกับการมองเห็นของหุ่นยนต์และอัลกอริธึม SLAM
ขนาดที่เล็กลง การวัดระยะทางและการวางตำแหน่งแบบบูรณาการ
การขยายสถานการณ์การใช้งาน
หุ่นยนต์อุตสาหกรรม: การประกอบที่มีความแม่นยำสูง-และการตรวจสอบที่ซับซ้อน
หุ่นยนต์บริการ: การแพร่หลายในสถานการณ์ครัวเรือน/เชิงพาณิชย์
หุ่นยนต์พิเศษ: สภาพแวดล้อมสุดขั้ว (ทะเลน้ำลึก ระดับความสูง)
แนวโน้มอุตสาหกรรม
ความต้องการของตลาดที่เพิ่มขึ้นได้แรงหนุนจากการขยายตัวของอุตสาหกรรมหุ่นยนต์
โมดูลภายในประเทศแทนที่การนำเข้า
บูรณาการกับ AI และ IoT เพื่อส่งเสริมความฉลาดของหุ่นยนต์
บทสรุป
6.1 สรุปหลัก
โมดูลเส้นเลเซอร์ขนาด 650nm 5mw ที่มีการใช้พลังงานต่ำ มองเห็นได้ชัดเจน และคุ้มค่า- มีการใช้กันอย่างแพร่หลายในหุ่นยนต์ มีข้อได้เปรียบที่ชัดเจนแต่ต้องเผชิญกับความท้าทายในการปรับตัวด้านสิ่งแวดล้อม การบูรณาการ และความเสถียร ซึ่งสามารถแก้ไขได้โดยการเพิ่มประสิทธิภาพตามเป้าหมาย
6.2 โอกาสการวิจัย
ความพยายามในอนาคตจะมุ่งเน้นไปที่การเพิ่มประสิทธิภาพโมดูลและการบูรณาการ การขยายสถานการณ์การใช้งาน และส่งเสริม-การบูรณาการในเชิงลึกกับหุ่นยนต์และเทคโนโลยี AI เพื่อส่งเสริมอุตสาหกรรมหุ่นยนต์
ข้อมูลการติดต่อ:
หากคุณมีความคิดใด ๆ โปรดพูดคุยกับเรา ไม่ว่าลูกค้าของเราจะอยู่ที่ไหนและความต้องการของเราคืออะไร เราจะปฏิบัติตามเป้าหมายของเราเพื่อให้ลูกค้าของเราได้รับคุณภาพสูง ราคาต่ำ และบริการที่ดีที่สุด
 อีเมล์:info@loshield.com; laser@loshield.com
อีเมล์:info@loshield.com; laser@loshield.com
 โทร:0086-18092277517; 0086-17392801246
โทร:0086-18092277517; 0086-17392801246
![]() แฟกซ์: 86-29-81323155
แฟกซ์: 86-29-81323155
 วีแชท:0086-18092277517; 0086-17392801246
วีแชท:0086-18092277517; 0086-17392801246


